Technologies
Publié le 22 déc 2023Lecture 8 min
Utilisation du jumeau numérique PrediSurge® dans la planification des procédures de stenting carotidien : étude préliminaire
Nicolas VALÉRIO1, Raphaël SOLER1, Baptiste PILLET2, Jean-Noël ALBERTINI1,2, 1. Service de Chirurgie vasculaire et endovasculaire, hôpital Saint-Joseph, Marseille ; 2. PrediSurge®, Saint-Étienne

La technique du stenting carotidien est une alternative établie à la chirurgie conventionnelle, en particulier dans les situations à haut risque chirurgical : configuration anatomique défavorable (sténose haute, occlusion controlatérale), resténose postendartériectomie et antécédent de radiothérapie cervicale. Les études randomisées récentes comme ACST-2(1), ont mis en évidence des taux cumulés de morbi-mortalité à court et long terme équivalents à ceux constatés après la chirurgie conventionnelle. Toutefois, la planification préopératoire de ces procédures endovasculaires nous semble perfectible, afin de garantir des taux de succès technique élevés et d’accident neurologique postopératoire faibles, et en faire ainsi une alternative indiscutable à la chirurgie en première intention.
Planification conventionnelle des procédures de stenting carotidien
Description
Cette planification se fait à partir de l’angioscanner des troncs supra-aortiques, idéalement avec l’aide d’un logiciel dédié de post-traitement d’images. Ces logiciels permettent la réalisation de reconstructions 3D multiplanaires et le long de la ligne centrale vasculaire. Ainsi, les mesures de diamètre de l’axe carotidien en amont et aval de la lésion, la longueur de la plaque carotidienne, ainsi que l’évaluation de sa morphologie (calcifications, degré de sténose, tortuosités) peuvent être réalisées. À partir de ces mesures, l’opérateur va devoir choisir le type de stent, sa configuration (conique ou droit) et ses dimensions (diamètre et longueur).
Limites de la planification conventionnelle
La principale limite de cette méthode est la difficulté à prédire avec précision le comportement mécanique des différents stents utilisables pour une lésion carotidienne donnée. Un choix de stent inadapté peut être associé à un résultat peropératoire suboptimal et/ou à la survenue d’une resténose intrastent. En effet, il est aujourd’hui bien établi qu’un degré d’oversizing excessif(2), tout comme une apposition insuffisante du stent sur la paroi artérielle(3,4) sont des facteurs de risque de resténose intrastent. Une métrique plus précise de l’interaction stent/paroi artérielle est la force centrifuge chronique (« chronic outward force »), qui représente la force radiale exercée par le stent en tout point de contact avec la paroi artérielle. Cette force dépend non seulement de l’oversizing mais aussi d’autres paramètres, tels que le design des cellules, l’épaisseur du strut et le matériau constituant le stent. La prise en compte de tels paramètres est donc impossible avec les logiciels actuellement disponibles.
Technologie de simulation numérique et du jumeau digital
Compte tenu des limitations évoquées ci-dessus, le but de nos travaux était d’évaluer la faisabilité d’un modèle numérique patient spécifique prenant en compte les interactions mécaniques entre stent et artère carotide traitée.
La technologie choisie était basée sur l’analyse d’éléments finis, largement utilisée depuis les années 1990 pour l’étude des contraintes mécaniques dans de nombreuses industries (aéronautique, automobile, bâtiment, etc.). Le principe est de créer des modèles 3D numériques du stent et de la carotide, en y intégrant les propriétés mécaniques correspondantes. Il devient alors possible de simuler virtuellement le déploiement de n’importe quel stent dans le jumeau numérique patient spécifique de la carotide, en tenant compte des interactions mécaniques dispositif-anatomie. Les jumeaux numériques développés dans cette étude ont été fournis par une version prototype de la plateforme de simulation PlanOp((PrediSurge, Saint-Étienne,www.predisurge.com), déjà utilisée en routine clinique courante pour la planification des endoprothèses aortiques.
Jumeaux numériques des stents carotidiens (figure 1)
Figure 1. Modélisation des stents AcculinkTM (A) et X-ActTM (B) . La géométrie des stents (dimension, motif, épaisseur des struts) est reproduite à l’identique grâce aux spécifications et à des échantillons fournis par le fabricant. Le stent est ensuite divisé en de multiples éléments auxquels sont attribués les propriétés mécaniques du nitinol. Chaque stent comporte environ 6 500 éléments, dont la dimension moyenne est de 0,2 mm.
La géométrie et les dimensions des stents X-ActTM et AcculinkTM (Abbott Médical, Rungis) ont été obtenues à partir des spécifications et d’échantillons fournis par le fabricant. L’intégration des propriétés mécaniques du nitinol s’est faite à partir des données de la littérature(5) et à partir de tests mécaniques complémentaires réalisés au Centre d’ingénierie et santé de l’École des Mines de Saint-Étienne.
Jumeau numérique de la bifurcation carotidienne (figure 2)
Figure 2. Modalités de création du jumeau numérique patient spécifique de la bifurcation carotidienne. Une segmentation de la lumière artérielle (B) est réalisée à partir du scanner préopératoire. Un maillage surfacique du modèle segmenté est ensuite effectué selon la méthode précédemment décrite pour les stents. Le modèle carotidien obtenu (C) comporte environ 35 000 éléments dont la dimension moyenne est de 0,5 mm. Les propriétés mécaniques de la paroi artérielle carotidienne sont ensuite attribuées à chacun des éléments obtenus au cours de la phase de maillage.
La géométrie de la bifurcation carotidienne a été obtenue à partir de l’angioscanner préopératoire, réalisé selon le protocole utilisé en routine clinique. Une segmentation de la lumière artérielle a été initialement réalisée. Dans un deuxième temps, un maillage de la surface obtenue à l’étape précédente a été exécuté. La dernière étape consistait à attribuer les propriétés mécaniques de la paroi carotidienne à chacun des éléments précédemment obtenus. On dispose ainsi d'un véritable avatar digital de la bifurcation carotidienne, capable de se déformer sous l’effet des contraintes mécaniques.
Simulation du déploiement d’un stent dans le jumeau numérique carotidien (figure 3)
Figure 3. Une fois les jumeaux numériques de la bifurcation carotidienne (A) et du stent (B) obtenus, une simulation du déploiement du stent dans l’artère carotide est réalisée (C). Le résultat final rend compte d’un état d’équilibre obtenu pour chacun des éléments du stent et de la carotide, dont les déplacements ont été conditionnés par leur interaction, en fonction de leurs propriétés mécaniques respectives. On peut voir nettement la déformation du stent déployé à l’intérieur de la carotide. Le modèle carotidien se déforme également, en particulier en regard des sténoses proximales et distales qui ont disparu. Un algorithme spécifique permet l’évaluation des contraintes mécaniques exercées par le stent sur la paroi du jumeau numérique carotidien (D). Une échelle couleur semiquantitative permet d’apprécier l’importance des contraintes tout au long du stent. Celles-ci sont maximales au niveau de la sténose proximale. La valeur exacte de la contrainte est disponible pour chaque élément de la carotide en contact avec un ou plusieurs éléments du stent, soit environ 10 000 valeurs calculées dans le cas de ce patient.
La phase finale a consisté à simuler le déploiement des stents dans les jumeaux numériques carotidiens correspondants. Cette étape ultime a nécessité une simulation de la compression du stent avant son introduction dans le modèle carotidien. Un déploiement virtuel a été ensuite réalisé. La position du stent était calculée en mesurant la distance entre l’extrémité proximale du stent et la bifurcation carotidienne sur le scanner postopératoire. La validation du modèle reposait ensuite sur la comparaison entre le jumeau numérique et le scanner postopératoire des diamètres proximal et distal, ainsi que de la position distale du stent sur l’artère carotide interne. Enfin, le modèle a permis d’étudier les contraintes exercées en tout point par le stent sur la paroi de l’artère carotide (exprimées en MPa), et en particulier à ses extrémités.
Conclusion
La technologie du jumeau numérique permet de prédire avec une grande précision le déploiement des stents carotidiens Abbott. Une étude incluant 20 patients a été menée pour confirmer ces résultats préliminaires et est en cours de publication. Au vu des résultats, nous sommes persuadés que la technique du jumeau numérique peut permettre une amélioration significative de la précision de la planification du stenting carotidien, et ainsi rendre cette procédure mini-invasive encore plus fiable et plus durable. Pour cette raison, nous avons souhaité poursuivre nos travaux par une étude clinique multicentrique qui est en cours d’élaboration.
Cas clinique n°1 (figure 4)
Un homme âgé de 73 ans aux antécédents de néoplasie de la corde vocale traitée par chirurgie et irradiation cervicale en 2016 a consulté pour deux épisodes d’amaurose gauche de survenue récente. L’échoDoppler et l’angioscanner mettent en évidence une sténose évaluée à 80 % dont l’origine est l’artère carotide interne gauche. Une dilatation carotidienne avec protection cérébrale par filtre EmboshieldTM (Abbott Médical®, Rungis) et un stent X-ActTM 8-6 30 a été réalisée.
Les diamètres proximal et distal des stents réel et simulé étaient respectivement de 9 et 8,9 mm et de 5,9 et 6,3 mm. Les distances bifurcation carotidienne/extrémité distale des stents réel et simulé étaient identiques à 10,8 mm. Les contraintes exercées par le stent sur la carotide aux extrémités proximale et distale étaient respectivement de 0,36 et 0,43 MPa.
Figure 4. Le scanner préopératoire montre une sténose évaluée à 80 % dont l'origine est l'artère carotide interne (A). Obtention du jumeau numérique de la bifurcation carotidienne à partir du scanner préopératoire (B). Simulation de déploiement du stent X-ActTM 8-6 30 en positionnant son extrémité proximale à la même distance de la bifurcation carotidienne que mesurée sur le scanner postopératoire (C). La distance entre l’extrémité distale des stents simulé et réelle et la bifurcation carotidienne est identique. Les diamètres des extrémités proximale et distale des stents simulé (C) et réel (D) sont également similaires (respectivement, 9 et 6 mm).
Cas clinique n°2 (figure 5)
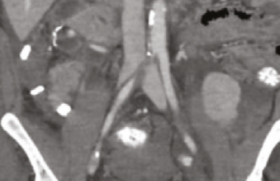
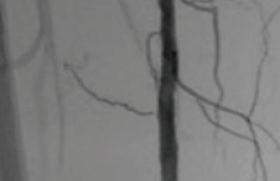
Une resténose carotidienne gauche serrée a été mise en évidence chez une patiente asymptomatique âgée de 66 ans, aux antécédents d’endartériectomie carotidienne bilatérale en 2021. Un stent AcculinkTM 8-6 30 était mis en place avec une protection cérébrale par un filtre EmboshieldTM.
Les diamètres proximal et distal des stents réel et simulé étaient respectivement de 7,1 et 6,8 mm et de 5,3 et 5,2 mm. Les distances bifurcation carotidienne/extrémité distale des stents réel et simulé étaient respectivement de 11 et 11,6 mm. Les contraintes exercées par le stent sur la carotide aux extrémités proximale et distale étaient respectivement de 0,18 et 0,10 MPa.
Figure 5. Le scanner préopératoire montre une sténose de la bifurcation carotidienne gauche (A). Obtention du jumeau numérique de la bifurcation carotidienne à partir du scanner préopératoire (B). Simulation de déploiement du stent AcculinkTM 8-6 30 en positionnant son extrémité proximale à la même distance de la bifurcation carotidienne que mesurée sur le scanner postopératoire (C). La distance entre l’extrémité distale des stents simulé (C) et réel (D), et la bifurcation carotidienne est similaire (respectivement 12 et 11 mm). Les diamètres des extrémités proximale et distale des stents simulé et réel sont également similaires (respectivement 5 et 7 mm).
Attention, pour des raisons réglementaires ce site est réservé aux professionnels de santé.
pour voir la suite, inscrivez-vous gratuitement.
Si vous êtes déjà inscrit,
connectez vous :
Si vous n'êtes pas encore inscrit au site,
inscrivez-vous gratuitement :